طراحی و ساخت مدل اولیه دست مصنوعی هوشمند توسط محققان کشور
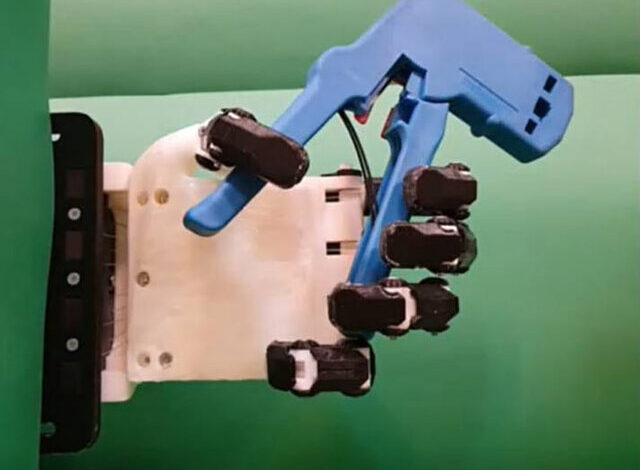
پژوهشگران گروه هوش مصنوعی و رباتیک، دانشکده مهندسی برق و کامپیوتر دانشگاه تهران موفق به طراحی و ساخت نمونه آزمایشگاهی دست مصنوعی هوشمند شدند.
رضوان نصیری، مسئول طرح در گفتوگو با ایسنا، با بیان اینکه بنیاد ملی علم ایران هزینههای این طرح پژوهشی را تأمین کرده است، همه اعضای این تیم پژوهشی را عضو پژوهشکده تحقیقاتی رباتیک، هوش مصنوعی و علوم اطلاعات (RAIIS) برشمرد و درباره ویژگیهای این دست مصنوعی هوشمند گفت: این دست مصنوعی بر اساس هندسه دست انسان طراحی شده است. هر انگشت دارای سه بند انگشت بوده و کل دست از مکانیزم فنر سری با موتور (Series Elastic Actuator; SEA) بهره میبرد که ۷ ویژگی جذاب را به این دست میبخشند.
وی ادامه داد: نخستین ویژگی امکان گرفتن اشیاء با شکلهای مختلف، دومین کاهش مصرف انرژی، کنترل موقعیت دست مصنوعی، کنترل نیرو وارده به اشیاء، تشخیص سر خوردن اجسام، کنترل امپدانس، ایمنی بالا. از جمله این ویژگیهاست که همه این ویژگیها تنها با استفاده از دو موتور پیادهسازی شدهاند.
*مهمترین مزیت دست مصنوعی طراحیشده استفاده از شمار اندک موتورها
این پژوهشگر هوش مصنوعی و رباتیک دانشگاه تهران، مهمترین مزیت دست مصنوعی طراحیشده را استفاده از شمار اندک موتورها (تنها دو موتور برای کل طراحی)، کنترل ساده به کمک فرمانهای مایو الکتریک (قابلیت کنترل توسط تنها دو سنسور EMG) و در نتیجه هزینه اندک طراحی دانست.
نصیری، در ادامه خاطرنشان کرد: پیکربندی انگشتان دست مصنوعی هوشمند بهنحوی طراحی شده است که تنها با استفاده از دو موتور و ترکیبی از فنرها و قرقره، دست مصنوعی قابلیت تنظیم زوایای مفاصل براساس شکل اشیاء را دارد.
وی ادامه داد: دست مصنوعی هوشمند به کمک قابلیت کنترل نیرو و موقعیت میتواند یک کاغذ استوانهای را با نیروی پائین، متوسط و زیاد بگیرد بهنحوی که در حالت نیروی پائین کاغذ استوانهای از دست سر میخورد؛ اما در حالت نیروی متوسط کاغذ بهنحو صحیحی توسط دست مصنوعی گرفته خواهد شد.
این عضو هیأت علمی دانشگاه تهران، با بیان اینکه در حالت نیروی زیاد، دست مصنوعی کاغذ را مچاله میکند. در ادامه درباره کنترل امپدانس هم توضیح داد: کنترل امپدانس یک ویژگی کاهش تاثیر نیروهای خارجی بر عملکرد دست مصنوعی است و اگر یک دست مصنوعی نتواند امپدانس مفاصل خود را بهنحو مناسبی کنترل کند در عمل کاربری مناسبی نخواهد داشت.
*توانایی دست مصنوعی هوشمند در تشخیص سرخوردن اجسام بدون داشتن سنسورهای نوک انگشتان
نصیری افزود: دست مصنوعی طراحیشده امکان تشخیص سرخوردن(لغزش) اجسام را بدون داشتن سنسورهای نوک انگشتان دارد. این برای نخستین بار است که یک دست مصنوعی هوشمند توانسته بدون داشتن سنسور نوک انگشتان لغزش اجسام را تشخیص داده و حرکات خود را تنظیم کند.
این عضو هیأت علمی گروه هوش مصنوعی و رباتیک دانشگاه تهران، در جمعبندی نهایی عنوان کرد که ادامه این کار تحقیقاتی، هدف طراحی یک دست مصنوعی ارزانقیمت با قابلیت عملیاتی بالا برای افراد قطع عضو داخل کشور است و در این راستا از هر گونه همکاری عملی توسط سایر پژوهشگران حوزه توانبخشی و علوم پزشکی و از کمک سرمایهگذاران این حوزه برای پیش برد این تحقیقات استقبال میکند.
رضوان نصیری، مجری و مسئول طرح، عرفان کوچکزاده، علیرضا کارگر، پارسا ستاری، سیده دیبا روانشید از همکاران این طرح پژوهشی بودهاند.