
ساخت یک ربات با اندام های جمع شونده
دانشمندان با الهام از نحوه حرکت مورچه ها در فضاهای باریک با کوتاه کردن پاهای خود، رباتی ساخته اند که اندام خود را برای حرکت در گذرگاه های کوچک منقبض می کند.
به گزارش سیناپرس، محققان اعلام کردند: رباتی ساخته اند که قادر است به سرعت از گذرگاه هایی که از خودش باریک تر و کوتاه تر هستند، عبور کند. این ربات همچنین می تواند از پله ها بالا برود و روی چمن، سنگ های سست، مالچ و گرانیت خرد شده حرکت کند.
فیفی کیان (Feifei Qian) مهندس رباتیک در این باره می گوید: چنین عمومیت و سازگاری، چالشهای اصلی حرکت رباتهای متحرک هستند. برخی از ربات ها دارای اندام های تخصصی برای حرکت در یک زمین خاص هستند، اما نمی توانند در فضاهای کوچک فشرده شوند.
کیان از دانشگاه کالیفرنیای جنوبی می گوید: طراحی که بتواند با محیط های مختلف با مقیاسها یا سختیهای متفاوت سازگار شود، بسیار چالشبرانگیزتر است، زیرا باید مبادلات بین محیط های مختلف در نظر گرفته شود.
برای الهام گرفتن، محققان در مطالعه جدید به مورچه ها روی آوردند. نیک گراویش (Nick Gravish) محقق روباتیک دانشگاه کالیفرنیا می گوید: حشرات واقعاً الهام بخش برای طراحی سیستمهای رباتی هستند که حداقل تحرک را دارند، اما می توانند رفتارهای حرکتی زیادی انجام دهند. مورچه ها حالت خود را برای خزیدن در فضاهای کوچک تطبیق می دهند و حرکت آنها توسط زمین ناهموار یا موانع کوچک آشفته نمی شود.
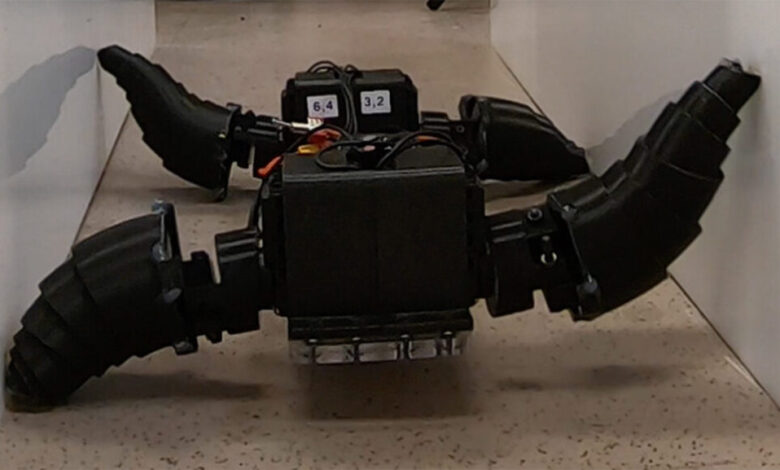
گراویش و همکارانش یک ربات کوتاه و تنومند حدود ۳۰ سانتی متر طول ض و ۲۰ سانتی متر عرض با چهار اندام مواج و تلسکوپی ساختند. هر اندام از شش لوله متحدالمرکز تو در تو تشکیل شده است که می توانند به داخل یکدیگر کشیده شوند. علاوه بر این، اندام ها برای تغییر طول کلی خود نیازی به تقویت فعال یا تنظیم ندارند. در عوض، فنرهایی که بخشهای پا را به هم متصل می کنند، به طور خودکار به پاها اجازه می دهند که وقتی ربات در یک فضای باریک حرکت می کند، منقبض شده و در فضای باز به عقب کشیده شوند.
کیان در مورد پاهای این ربات می گوید: سریعتر از کنترل فعال است که ابتدا تماس با محیط را حس کرده، اقدام مناسب را محاسبه می کند و سپس فرمان را به موتورهای خود می فرستد. حذف اجزای حسگر و محاسباتی همچنین می تواند رباتها را کوچک، ارزانتر و انرژی کمتری مصرف کند.
این ربات می تواند عرض و ارتفاع بدن خود را برای دستیابی به طیف وسیع تری از اندازه های بدن نسبت به سایر ربات های مشابه تغییر دهد. بخشهای پا به درون خود منقبض می شوند تا به ربات اجازه دهند از میان تونلهای کوچک حرکت کند و وقتی زیر سقفهای کم قرار دارد بتواند به بیرون بخزد. این سازگاری به ربات اجازه می دهد تا در فضاهایی به کوچکی ۷۲ درصد عرض کامل و ۶۸ درصد ارتفاع کامل خود فشرده شود.
تولید چنین رباتهایی با مقیاس کوچک و حداقلی آسان است و می توان آنها را به سرعت برای کاوش در محیط های پیچیده تغییر داد. گراویش می گوید، با این حال، علیرغم اینکه این رباتها می توانند در زمینهای مختلف راه بروند، در حال حاضر برای جستجو و نجات، اکتشاف یا نظارت بیولوژیکی بسیار شکننده هستند.
به گزارش سیناپرس، کیان در پایان می گوید ربات جدید یک قدم به این اهداف نزدیکتر میشود، اما رسیدن به آن چیزی فراتر از رباتیک است. برای دستیابی به این کاربردها به یکپارچگی طراحی، کنترل، سنجش، برنامه ریزی و پیشرفت سخت افزار نیاز است.
گزارش کامل ساخت و توانایی های این ربات در مجله تخصصی Advanced Intelligent Systems منتشر شده است.
مترجم: مهگل غفاری
No tags for this post.




