
دانش ایرانی در مهندسی دریا
طراحی ربات ماهی، ربات زیرآبی، نرم افزار شبیهساز شناور تندرو، ساخت قفسهای پرورش ماهی، طراحی، ساخت و تست داکت پاشنه برای کاهش مصرف سوخت شناورها، ساخت سکوهای شناور از نوع پایه کششی، طراحی مدل فیزیکی سکوی نیمه شناور امیرکبیر، مدلسازی فیزیکی پایههای کیسونی پل خلیج فارس و ساخت و راه اندازی سیستم تست در آبهای آزاد از جمله این دستاوردها است.
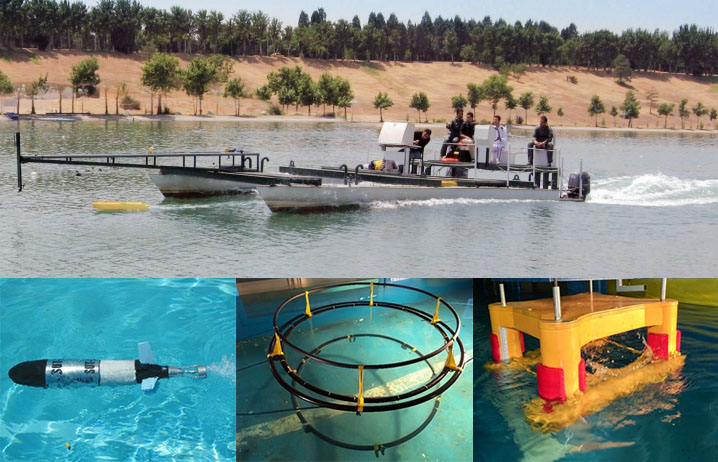
ربات ماهی
استفاده از قانون طبیعت و مكانیزم حركتی ماهیها برای ساخت انواع ربات های زیر آبی موضوع بسیار مهمی است كه طی سالهای اخیر مورد توجه واقع شده است. هم اکنون برای دستیابی به این تكنولوژی، فعالیتهای گسترده ای از سوی محققان مرکز پژوهشی مهندسی دریا شریف آغاز و نمونه های مختلفی از ربات ماهی ها ساخته شده است. 
ربات زیرآبی
معمولا رباتهای زیر آب از نوع ROV محدودیتهای زیادی به علت وابستگی به شناورهای پشتیبان دارند بنابراین مستقل شدن آن و تامین توان و هدایت آن به صورت خودكار بسیار مهم است. هم اکنون با تلاش محققان این مجموعه انواعAUV(Autonomus Underwater Vehicles) ها طراحی و نمونه ای از آن ساخته شده است.
نرم افزار شبیهساز شناور تندرو
امروزه عمده شبیه سازهای توسعه داده شده در سطح دنیا مختص شناورهای جابه جایی هستند. محققان این مجموعه به منظور توسعه شبیه ساز شناورهای تندروی پروازی، یک نرم افزار شش درجه آزادی طراحی کرده اند که قادر است حرکات شناور تندرو تحت اثر امواج و مانور آن را شبیه سازی کند. نتیجه این کار با استفاده از تست مدل اعتبار سنجی انجام شدهاست.
قفسهای پرورش ماهی
امروزه با توجه به کاهش ذخایر آبزیان دریایی( به خصوص ماهیهای گونههای خاص)، جهان به سمت استفاده از قفس ماهیان دریایی به خصوص در آب های عمیق گام بر داشته است. هم اکنون نروژ، ژاپن، استرالیا و مکزیک از جمله کشورهایی هستند که بسیار صنعتی و دقیق به این موضوع پرداخته اند.
این قفس ماهیها از بخشهای مختلفی تشکیل شده و انواع مختلفی دارد. گونه متعارف آن(قفس های شناور) در دریاهای آزاد دور از ساحل مورد استفاده قرار می گیرد. این نوع قفس ها دارای بخش های اصلی مختلف از جمله، تور، تیوب شناور، تیوب مغروق، لنگر و خطوط مهار است.
پژوهشگران مرکز پژوهشی مهندسی دریا دانشکده مکانیک دانشگاه صنعتی شریف نیز برای نخستین بار در ایران به بررسی، تدوین و بومی سازی استانداردها و تعیین ضوابط فنی طراحی، ساخت و نصب قفس های پرورش ماهیان دریایی پرداخته اند.
هدف از این طرح تحقیقاتی تدوین اولین استاندارد ملی در حوزه مهندسی ساخت، تحلیل و طراحی قفس ماهی ها با در نظر گرفتن شرایط زیست محیطی و زیست دریایی برای شمال و جنوب کشور ایران است. این استاندارد پس از نهایی شدن و بررسی شرایط ثبت می تواند با همکاری سازمان شیلات ایران و جهاد کشاورزی مورد بهره برداری قرار گیرد و در سال های بعد اقدامهای اولیه ساخت اولین قفس ماهی به صورت فنی بر پایه تحقیقات داخلی صورت پذیرد.
روشی جدید برای کاهش مصرف سوخت شناورها
طراحی، ساخت و تست داکت پاشنه برای کاهش مصرف سوخت شناورها از دیگر طرح های این مرکز است.هدف از اجرای این پروژه طراحی و ساخت یک داکت متعادل کننده «ویک» به منظور بهبود عملکرد سیستم رانش و کاهش مصرف انرژی است. در این راستا از ترکیب شبیهسازی عددی و تستهای آزمایشگاهی استفاده شده است. داکتهای متعادل کننده ویک با داشتن دو اثر مهم(اثر داکت روی بدنه و پروانه) در کااهش مصرف انرژی موثر هستند.
هنگامی که داکت در پاشنه شناور نصب میشود، میدان فشار در ناحیه پاشنه شناور، متاثر از داکت شده و نهایتا جدایش جریان در ناحیه پاشنه به تاخیر میافتد و مقاومت شناور کاهش یافته و مصرف سوخت شناور در سرعت طراحی کاهش مییابد. همچنین با بهبود میدان ویک ورودی به پروانه، عملکرد پروانه بهبود مییابد و افزایش راندمان پروانه نیز نهایتا در کاهش مصرف سوخت موثر خواهد بود.
امروزه عمده شبیه سازهای توسعه داده شده در سطح دنیا مختص شناورهای جابه جایی هستند. محققان این مجموعه به منظور توسعه شبیه ساز شناورهای تندروی پروازی، یک نرم افزار شش درجه آزادی طراحی کرده اند که قادر است حرکات شناور تندرو تحت اثر امواج و مانور آن را شبیه سازی کند. نتیجه این کار با استفاده از تست مدل اعتبار سنجی انجام شدهاست.
طراحی سکوهای شناور پایه کششی
سکوهای شناور از نوع پایه کششی یک نوع سکوی تطبیقی است که دارای سیستم مهارعمودی با نیروی شناوری اضافه است. این نوع سکوها معمولا برای حفاری در آب عمیق مورد استفاده قرار می گیرد. از مهمترین خواص این سکوها می توان به استخراج نفت در حوزههای نفتی بزرگ اشاره کرد. در بعضی از نقاط جهان از این سکو به عنوان تکیه گاه توربین های بادی نیز استفاده می شود.
هم اکنون مدل آزمایشگاهی سکویISSCTLP در آزمایشگاه مهندسی دریا دانشگاه شریف ساخته شده و دامنه پاسخ حرکات صفحه افق سکو به همراه نمودار تاریخچه زمانی این حرکتها در حالت پایدار و صدمه دیده در زوایههای مختلف برخورد موج منظم و مقدارهای پیشکشیدگیهای مختلف توسط تاندونها استخراج شده است.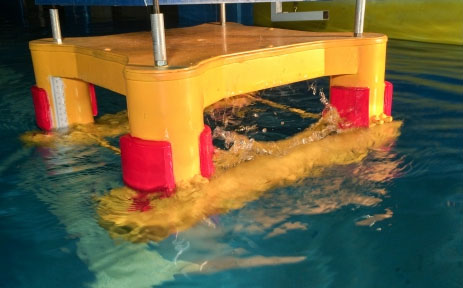
سکوی امیرکبیر ؛ تنها دستگاه حفار شناور کشور
مدل فیزیکی سکوی نیمه شناور امیرکبیر، تنها دستگاه حفار شناور کشور در دریای خزر به منظور انجام تست های دریامانی در دانشگاه صنعتی شریف ساخته شد. مدل مذکور، تنها مدل ساخته شده از سکوی نیمه شناور امیرکبیر در کشور است که برای انجام تست های دریامانی ساخته شده است.
این تست به منظور ارزیابی حرکت های شش درجه آزادی سکوی امیرکبیر در شرایط دریایی و الگوهای مهاربندی مختلف است. طول این مدل 56 سانتی متر و عرض آن 51 سانتی متر است. وزن مدل ساخته شده 6 کیلوگرم بوده که برای انجام تستها باید تا 9/5 کیلوگرم ارتقا یابد.
مدلسازی فیزیکی پایههای کیسونی پل خلیج فارس
ایده احداث راه ارتباطی جزیره قشم با سواحل خاک مادری از دهه50 و از زمان احداث نخستین بندر آزاد تجاری ایران در این جزیره مطرح شده است. در این طرح قرار بود به واسطه یک پل سنگی، جزیره قشم به یک مرکز توریستی و تجاری بزرگ در دهانه خلیج فارس و تنگه هرمز مبدل شود. از جمله چالش های بزرگ این طرح، فرایند انتقال و مغروق سازی بلوک های کیسونی پیش ساخته و فوق سنگین آن در دریا است.
محققان دانشگاه صنعتی شریف با بررسی عددی و آزمایشگاهی سناریوهای انتقال و نصب کیسون های پل خلیج فارس در دریا درصدد رفع این چالش هستند. آنها برای این منظور، پایه های کیسونی در نرم افزار موسس برای مطالعه عددی رفتار سازه مدلسازی کرده اند و قرار است که مطالعههای آزمایشگاهی این طرح در آزمایشگاه دریا دانشگاه صنعتی شریف صورت بگیرد.
ساخت و راه اندازی سیستم تست در آبهای آزاد
تست مقاومت یکی از مهمترین تست ها در طراحی شناورها است. انجام این تست معمولا مستلزم ساخت و ایجاد آزمایشگاه های بزرگ مجهز به کانال کششTowing Tank بوده که زمان بر و نیازمند سرمایه گذاری بسیار قابل توجه خواهد بود.
بر این اساس تجهیزات اندازه گیری تست مقاومت در آب های آزاد نسبت به تجهیزات حوضچه تست کشش که در فضاهای سربسته مورد استفاده قرار می گیرند، مزایای قابل توجهی دارند. نمونه ای از تجهیزات مورد نیاز برای این گونه تست های آب آزاد ساخته شده و هم اکنون می تواند تست مقاومت انواع شناورها معمول و تندرو را انجام دهد.
گزارش: فرزانه صدقی
No tags for this post.




