

تولید ربات های کارآمد زیر آب با سیستم مدولار
ربات های زیر آب با الهام از زیست شناسی که می توانند شکل خود را به صورت پویا تغییر دهند، بسیار کارآمدتر از همتایان صلب معمولی شان در آب حرکت می کنند، اما متاسفانه ساختن آنها بسیار دشوار است.
به گزارش سیناپرس، در حال حاضر یک تیم تحقیقاتی از موسسه تکنولوژی ماساچوست با رویکردی نوآورانه برای ایجاد ربات های زیر آب به موفقیت هایی دست یافته است. سیستم مدولار را می توان برای ساخت ربات هایی با اشکال و اندازه های مختلف با عناصر سخت و نرم استفاده کرد.
ربات های تغییر شکل پذیر با قطعات شبکه ای به نام وکسل ساخته می شوند که چگالی کم و سفتی بالایی دارند. وکسل های منفرد عمدتاً ساختارهای توخالی هستند که از قطعات پلاستیکی ریخته گری شده با پایه های باریک در اشکال پیچیده تشکیل شده اند. اشکال جعبه مانند در یک جهت باربر اما در جهت دیگر نرم هستند، ترکیبی غیرعادی که با ترکیب اجزای سفت و انعطاف پذیر در نسبت های مختلف به دست می آید.
تریانتفیلو (Triantafyllou) که بخشی از تیم اصلی موسسه تکنولوژی ماساچوست بود، می گوید: انعطاف پذیری صاف سطح بدنه به ما امکان می دهد تا کنترل جریان را مدیریت کنیم که می تواند کشش را کاهش داده و کارایی پیشرانه را بهبود بخشد و در نتیجه صرفه جویی قابل توجهی در انرژی خواهد داشت.
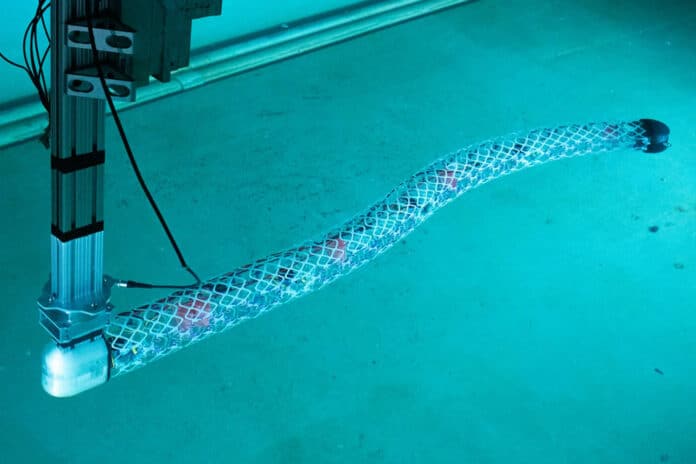
محققان این سیستم جدید را در دو پیکربندی مختلف نشان دادند که یکی شبیه به مارماهی و دیگری یک هیدروفویل بال مانند بود. در یک نمایش، پژوهشگران ساختاری به طول یک متر و مار مانند ساختند که از ۲۰ وکسل در یک ردیف طولانی به هم متصل شده بودند.
یک محرک در مرکز می تواند سیمی را که به هر یک از دو وکسل در دو طرف متصل است بکشد، آنها را منقبض کرده و باعث خم شدن ساختار می شود. کل ساختار با یک ساختار حمایتی دنده مانند و سپس یک پوست نئوپرن ضد آب محکم پوشیده شده است. آزمایش کارایی در آب نشان داد که این ربات می تواند نیروی رانش به جلو را به اندازه ای ایجاد کند که با استفاده از حرکات موجی به جلو حرکت کند.
محققان بیان می کنند: یک ربات مار مانند ساخته شده توسط ناسا از هزاران قطعه منحصر به فرد ساخته شده است، در حالی که ربات مار مانند این گروه تحقیقاتی تنها از حدود ۶۰ جزء منفرد تشکیل شده است.
مورد دیگری که پژوهشگران نمایش دادند یک شکل بال مانند یا هیدروفویل است که از آرایه ای از وکسلهای مشابه تشکیل شده است، اما می تواند شکل نمایه اش را تغییر داده و بنابراین نسبت بالابر به درگ و سایر ویژگیهای بال را کنترل کند.
به گزارش سیناپرس، در نهایت، دانشمندان معتقدند:این سیستم می تواند برای ساخت یک کشتی شناور مانند نهنگ به کار رود و از شکل بدنه شکل پذیر آن برای ایجاد نیروی محرکه استفاده کند. همچنین می توان آن را در قسمتهایی از قایق های مسابقه ای، استفاده کرد.
شرح کامل این پژوهش و مدل های آن در آخرین شماره مجله تخصصی Soft Robotics منتشر شده است.
مترجم: مهدی فلاحی پناه