

ساخت یک ربات سریع و نرم از روی گیره مو
سه نفر از محققان دانشگاه کلمبیا یک ربات بسیار ساده، کوچک و نرم را بر اساس فناوری گیره مو ساخته اند. Zechen Xiong، Yufeng Su و Hod Lipson مقالهای را در arXiv نوشتهاند که در آن ایده طراحی ربات خود و دو ربات ساخته شده را توضیح میدهند.
به گزارش سیناپرس همدان، از آنجایی که دانشمندان به طور مداوم به دنبال راههای جدید برای ساخت رباتهای کوچک و نرم هستند، اغلب به حیوانات یا سایر وسایلی روی میآورند که سادگی و کارایی انرژی را به حداکثر میرسانند. در این تلاش جدید، محققان، مانند بسیاری دیگر، متوجه شدند که نوع خاصی از گیره مو می تواند در یکی از دو حالت وجود داشته باشد، خم شدن به یک طرف گیره یا آن طرف. حرکت بین دو حالت به انرژی کمی نیاز دارد و به سرعت اتفاق می افتد. آنها با الهام از سادگی طراحی، اساس ساختاری یک روبات را ایجاد کردند.
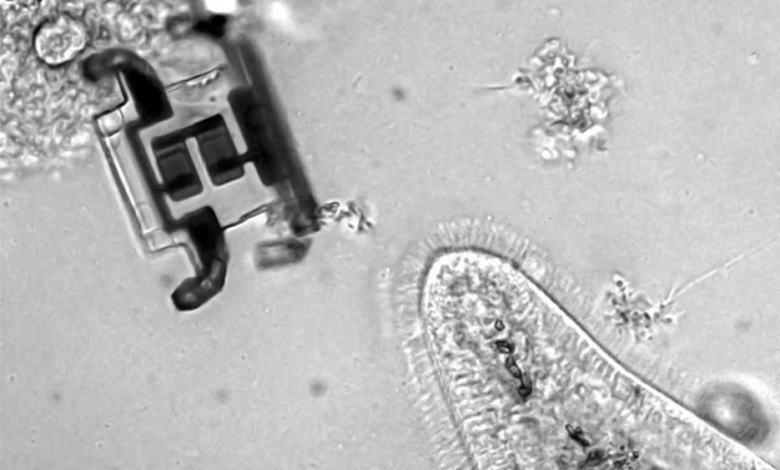
طرح اصلی شامل بریدن یک قطعه پلاستیکی صاف و قابل خم شدن به شکل یک C بود. سپس دو انتهای باز قطعه پلاستیکی را به هم نزدیک کردند و به هم محکم کردند. این تمام چیزی بود که برای تقلید از گیره مو لازم بود. سپس یک موتور کوچک را برای اعمال فشاری که معمولاً توسط انگشتان به گیره مو وارد میشود، به آن وصل کردند. با استفاده از مقدار کمی الکتریسیته، موتور میتواند پلاستیک را به یکی از شکلهای آن فشار دهد و این کار به همان سرعتی که با یک گیره مو انجام میشود، اتفاق میافتد.
در مرحله بعد، محققان برای تکمیل ربات خود زائده هایی شبیه به پا اضافه کردند. استفاده از موتور برای فشار دادن قاب بین حالتها، پاها را به جلو و عقب هل میدهد و به ربات اجازه میدهد روی سطح سخت راه برود. آزمایشات نشان داد که می تواند با سرعت بالای 313 میلی متر بر ثانیه راه برود که تقریباً به 1.6 طول خود در ثانیه تبدیل می شود. آنها همچنین قاب خود را به شکل یک ربات ماهی مانند درآوردند و دریافتند که می تواند با سرعت تقریبی 435 میلی متر در ثانیه از میان آب عبور کند که تقریباً به دو طول بدن در ثانیه تبدیل می شود. محققان ادعا می کنند که هر دو سرعت بیشتر از سایر ربات های مشابه هستند. محققان قصد دارند ربات های خود را در کنفرانس بین المللی رباتیک و اتوماسیون امسال به نمایش بگذارند.
منبع: medicalxpress
مترجم: کیانوش کرمی





