

جفت سازی روبات و پهپاد برای حرکت در مسیرهای دشوار
با وجود ابداع و تولید روبات های هوشمندی مانند روبات بیگ داگ (Big Dog) متعلق به مرکز دارپا (DARPA)، همچنان روبات ها با راه رفتن در برخی سطوح با مشکل مواجه هسند. به همین دلیل گروهی از محققان از آزمایشگاه سیستم های اتوماتیک زوریخ راهی را ابداع کردند که از طریق آن روبات ها می توانند به راحتی در برخی از سطوح مختلف زمین که تا کنون راه رفتن در آنها برای این دستگاه ها غیرممکن بوده است، وارد شوند.
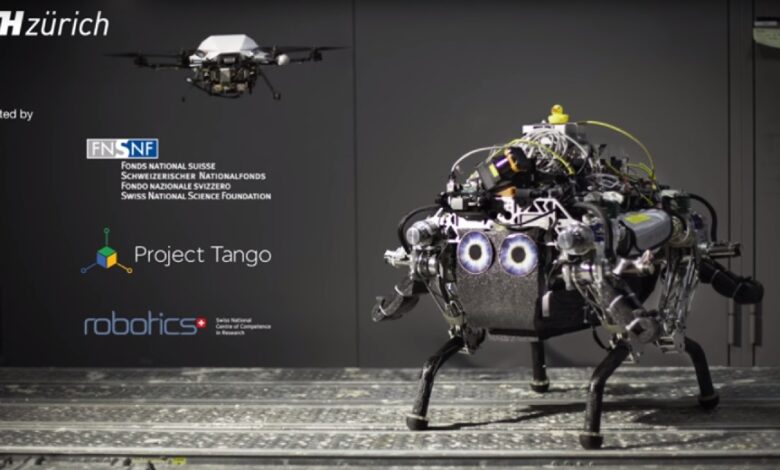
این محققان در فرایند ابداع این روش از یک جفت مکانیکی استفاده کردند. این جفت مکانیکی به گونه ای طراحی شده اند که در هماهنگی با هم می توانند از زمین های با پستی و بلندی و سطوح متغیر نقشه برداری کرده و روبات را راهنمایی کنند. در حقیقت این جفت مکانیکی یک پهپاد است که نقش چشمان اضافی برای روبات مورد نظر را ایفا خواهد کرد.
ابتدا این پهپاد ها در بالای زمین پرواز می کنند و نقشه کاملا واضحی از منطقه مورد نظر ترسیم می کنند که ارتفاعات نسبی زمین را نیز شامل می شود. سپس این پهپاد ها اطلاعات به دست آورده را با روبات مربوطه به اشتراک می گذارند و به این ترتیب کارآمد ترین و بهترین مسیر را به آنها نشان می دهند.
علاوه بر این روبات مورد نظر برای به روز کردن نقشه خود، به طور مستمر از فاصله یاب لیزری استفاده می کند و به این ترتیب از هر قدمی که قرار است بردارد مطمئن تر می شود. تیم تحقیقاتی این پژوهش در حال حاضر در حال بررسی دقیق تر این روش است و در صورت اطمینان، آن را در کنفرانس بین المللی IEEE که در سال 2016 میلادی برگزار می شود، معرفی خواهد کرد.
در ادامه می توانید یک ویدیو در زمینه نحوه کار این ساختار را مشاهده کنید که توسط مرکز دارپا منتشر شده است و در آن تمامی ساختار تهیه نقشه توپوگرافی توسط پهپاد و حرکت روبات به نمایش درآمده است. به این ترتیب می توانید مشاهده کنید که موانعی که پیش از این سد راه روبات ها می شدند، عملا برای این ماشین ها قابل عبور خواهند بود.