ترمیم خودکار رباتها پس از آسیبدیدگی در کمتر از دو دقیقه
زمانی فرا خواهد رسید که رباتها در حوزه تحقیقات و مأموریتهای امداد و نجات بیشترین منافع را برای بشر به ارمغان خواهند آورد، اما تنها زمانی این هدف محقق خواهد شد که رباتها بیاموزند چگونه پس از آسیبدیدگی به کار خود ادامه دهند.
برخلاف رباتهای امروزی، حیوانات و انسانها به راحتی میتوانند خود را با آسیبهای جسمانی و معلولیتها تطبیق داده و به فعالیتهای خود ادامه دهند؛ بعنوان مثال سگی که یک پای خود را از دست داده است، باز هم میتواند به دویدن ادامه دهد.
حیوانات به هنگام آسیبدیدگی، رفتارهای مختلف را برای غلبه بر ناتوانی بوجود آمده امتحان کرده و در نهایت بهترین راه را انتخاب میکنند. رباتها نیز میتوانند استراتژی مشابهی جهت بازیابی فعالیتهای خود پس از آسیبدیدگی استفاده کنند.
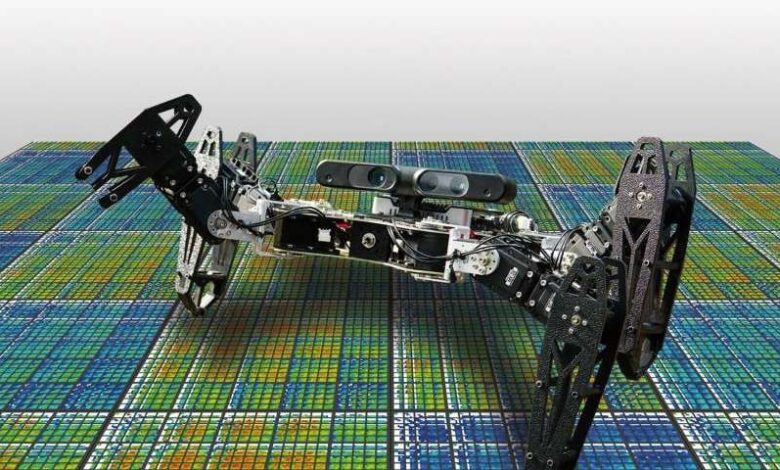
در فیلم ویدئویی که توسط محققان دانشگاه پیر و ماری کوری پاریس منتشر شده است، ربات شش پایی نمایش داده شده که با وجود شکستگی دو پا همچنان به راه رفتن ادامه میدهد؛ همچنین یک بازوی رباتیک نشان داده شده است که باوجود چندین موتور شکسته، یاد میگیرد چگونه اشیا را در محل درست خود قرار دهد.
در ابتدا از یک شبیهساز رایانهای استفاده میشود که موقعیت ربات را در محیط مورد نظر طراحی میکند؛ با کمک نقشه تهیه شده، رفتارهای مختلف ربات در محیط پیشبینی میشود.
در صورت بروز آسیبدیدگی، ربات از این اطلاعات در یک الگوریتم یادگیری استفاده میکند تا بتواند در کمترین زمان ممکن، بهترین رفتار و حرکت جایگزین را برای تکمیل مأموریت – باوجود آسیبدیدگی – پیدا کند؛ این الگوریتم جدید Intelligent Trial and Error نام دارد.
در حالت آسیبدیدگی، ربات تبدیل به یک محقق شده و تمامی راهحلهای ممکن را جهت ادامه فعالیت بررسی میکند.
الگوریتم جدید به توسعه رباتهای قدرتمند، موثر و مستقلتر منجر خواهد شد که در مأموریتهای امداد و نجات – بدون نیاز به کنترل دائمی از سوی انسان – کاربرد دارند.
نتایج این تحقیق در مجله Nature منتشر شده است.