


به گزارش ایرنا از پایگاه اینترنتی انجمن فیزیک آمریکا، طراحی روبات نرم و انعطاف پذیری که بتواند طبیعی حرکت کند، به عنوان مثال مانند انگشت خم شود و یا بچرخد، همواره یک رویه آزمون و خطا بوده است.در واقع طراحی روباتی که بتواند مانند انگشت و یا زانو خم شود به نظر ساده می رسد اما این حرکت فوق العاده پیچیده است.
اکنون محققان دانشکده مهندسی و علوم کاربردی جان پالسون در دانشگاه هاروارد و موسسه مهندسی زیستی ' ویس'، روشی برای طراحی خودکار محرک های (اکچویتورهای) نرم براساس حرکت مورد نظر ابداع کرده اند.
در روش ابداعی این محققان از الگوبرداری ریاضی محرک های تقویت شده با فیبر برای بهینه سازی طراحی یک محرک برای انجام یک حرکت خاص استفاده می شود.
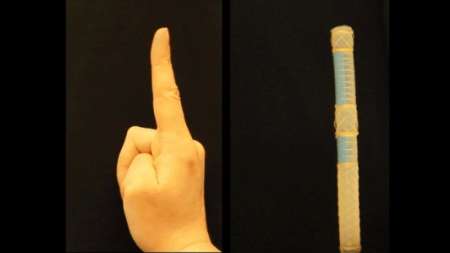
محققان با استفاده از این الگو روبات نرم طراحی کردند که با انرژی گرفتن از یک منبع فشار، مانند انگشت اشاره خم می شود و مانند انگشت شصت می چرخد.
به گفته محققان ، از این روش می توان برای طراحی بازوی روباتیک که در یک مسیر خاص حرکت می کند و یا یک روبات پوشیدنی که به حرکت یک عضو کمک می کند، استفاده کرد. این تحقیق در نشریه The Proceedings of the National Academy of Sciences منتشر شده است.