


هنگام طراحی ربات های زیر آب مانند ماهی ها، باید وسیله ای برای پیشرانه ای داشته باشید که هم از نظر انرژی و هم از نظر منطقی سریع باشد. یک سیستم جدید در دم ممکن است متناسب با این منظور باشد و راه را برای استفاده گسترده تر از چنین ربات هایی هموار کند.
به گزارش سیناپرس، یک مجموعه آزمایشی در یک ماهی رباتیک ساخته شده توسط تیمی از دانشمندان در دانشگاه بریستول به رهبری تسام لانگ یو (Tsam Long You) از یک نسخه اصلاح شده از مکانیسم معروف به پلیمر پیچ خورده و سیم پیچ (TCP) استفاده می کند.
به طور خلاصه ، پلیمر پیچ خورده و سیم پیچ ها به شکل یک خط و برخلاف سیی تلفن هستند. هنگامی که خط گرم می شود، سیم پیچ ها را محکم تر کرده و مانند عضله منقبض می شوند. هنگامی که گرما کم می شود، خط دوباره شل شده و به طول حالت پیش فرض قبلی باز می گردد.
یکی از محدودیت های چنین دستگاه هایی در این واقعیت نهفته است که آنها نمی توانند خیلی سریع حرکات تکراری ایجاد کنند زیرا حداقل یک ثانیه یا بیشتر طول می کشد تا دوباره بتوانند منقبض شوند، اما ماهی روباتیک جدید این مشکل را برطرف می کند.
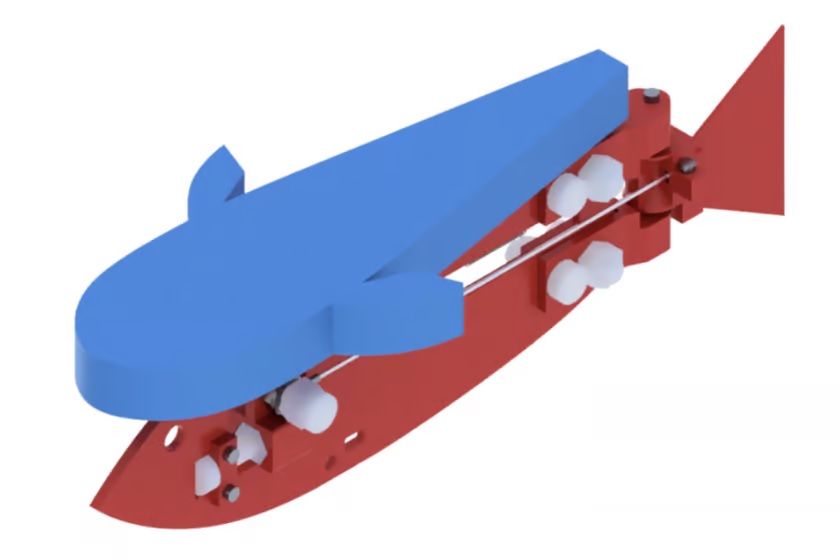
این ربات شامل یک پلیمر پیچ خورده با یک رسانا و یک فنر سیم پیچ فولادی معمولی است که در کنار طول ربات قرار دارد. آنها به طرفهای مخالف یک مکانیسم ضربه زدن به دم در انتهای عقب ربات وصل شده و از طریق پیوند در جلو به یکدیگر متصل می شوند.
هنگامی که یک جریان الکتریکی روی پلیمر پیچ خورده اعمال می شود، این ماده گرم و منقبض می شود و همزمان دم را به یک طرف می کشد. هنگامی که جریان متوقف می شود و پلیمر پیچ خورده آرام می شود، بازوی کشیده شده و دم را به طرف دیگر می کشد. به گزارش سیناپرس، تا زمانی که حرکت دم به طرف مخالف تمام شود، پلیمر پیچ خورده آماده است تا دوباره آن را به عقب بکشد.
در آزمایشات درون مخزن آب، این ربات توانست با سرعت دم دو موج در ثانیه شنا کند. دانشمندان اکنون این فناوری را در یک ماهی رباتیک چابک تر قرار می دهند که دارای یک باله است که در طول قسمت زیرین آن حرکت می کند.
به گزارش سیناپرس، یو در این باره می گوید: ماهی رباتیک ما در سریعترین فرکانس فعال سازی موجود در یک برنامه واقعی پلیمر پیچ خورده و همچنین بالاترین سرعت حرکت یک برنامه پلیمر پیچ خورده تاکنون شنا کرد. این دستاورد واقعاً هیجان انگیز است زیرا فرصت های بیشتری از کاربرد پلیمر پیچ خورده را در مناطق مختلف باز می کند.
شرح کامل این پژوهش در مقاله ای در کنفرانس بین المللی IEEE-RAS در سنگاپور ارائه شد.
مترجم: فاطمه امینی