


به گزارش سیناپرس همدان، محققان موسسه پلیتکنیک Worcester اخیراً OmniWheg را ایجاد کردهاند، یک سیستم روباتیک که میتواند پیکربندی خود را در حین حرکت در محیط اطراف خود تطبیق دهد و به طور یکپارچه از یک ربات چرخدار به یک ربات پادار تغییر کند. این ربات که در مقاله IEEE IROS 2022 معرفی شده است، که از قبل در arXiv منتشر شده است، بر اساس یک نسخه به روز شده از به اصطلاح wheg، مجموعه ای از مکانیزم ها طراحی شده است که چرخ ها یا بال های یک ربات را به پا تبدیل می کند.
پروفسور آندره روزندو، یکی از محققانی که این ربات را توسعه داده است، گفت: روباتهای چهارپا و دوپا در حال افزایش هستند و دلیل آن ممکن است جستجو برای «انسانسازی» باشد که عموم مخاطبان معمولاً در آن درگیر هستند. در حالی که توانایی رفتن به هر کجا که می رویم جذابیت هیجان انگیزی به نظر می رسد، هزینه انرژی پاها بسیار بالا است. ما انسان ها پا داریم زیرا این چیزی است که تکامل به ما داده است، اما جرات ایجاد یک «ماشین پادار» را نداریم، زیرا می دانیم که این سواری به اندازه یک ماشین چرخدار راحت و کم مصرف نخواهد بود.
ایده کلیدی پشت کار اخیر روزندو و همکارانش این است که در حالی که پاها رباتها را مرتبطتر میکنند و کیفیتی شبیه انسان یا حیوان به آنها میدهند، اما همیشه راهحل بهینه برای اطمینان از انجام سریع و کارآمد وظایف روباتها نیستند. این تیم به جای توسعه یک ربات با یک مکانیسم حرکتی واحد، تصمیم گرفت سیستمی ایجاد کند که بتواند بین مکانیسم های مختلف جابجا شود.
روزندو گفت: با نگاهی به اطراف خانهها و محلهای کارمان، میتوانیم ببینیم که محیطهای ما 95 درصد مسطح است و در نهایت 5 درصد از زمینهای ناهموار است که هنگام «انتقال» بین فضاها باید با آن مواجه شویم. سیستمی که در این 95 درصد موارد با راندمان «چرخ مانند» عمل می کند و به طور خاص در 5 درصد باقیمانده به راندمان پایین تر تبدیل می شود؟
روزندو و همکارانش تصمیم گرفتند چرخی بسازند که بتواند پیکربندی آن را برای بالا رفتن از پله ها یا دور زدن سایر موانع کوچک تغییر دهد. برای دستیابی به این هدف، آنها مفهوم whegs (به عنوان مثال، پایه چرخ یا بال-پا) را بررسی کردند که بیش از یک دهه است که وجود داشته و از آن زمان توجه قابل توجهی در زمینه رباتیک به خود جلب کرده است.
چندین سیستم پای چرخ در چند سال گذشته توسعه و آزمایش شده است. با این حال، بیشتر این سیستمها عملکرد خوبی نداشتند، عمدتاً به دلیل مشکلاتی در هماهنگی سمت راست و چپ سیستم پای چرخ، که باید در هنگام بالا رفتن از پلهها کاملاً در یک راستا قرار گیرند.
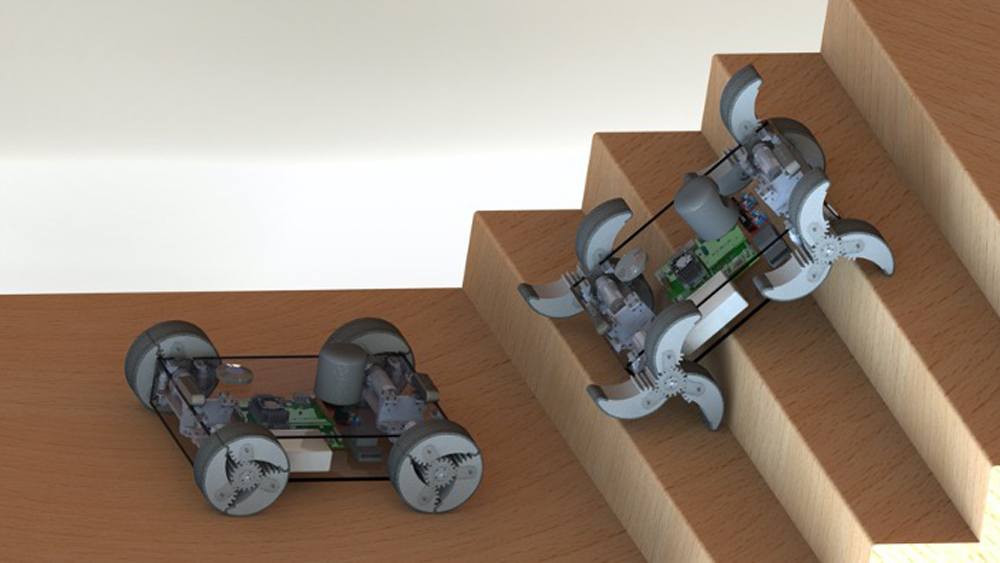
کائو یکی از پژوهشگران این ربات گفت : برای حل مشکلات هماهنگی که معمولاً با مکانیسمهای چرخ-پایه مرتبط است، از یک چرخ همه جهته استفاده شد. مگس بدون چرخش بدنش. ربات ما می تواند با هزینه انرژی بسیار کم به جلو، عقب و به طرفین حرکت کند، می تواند در یک موقعیت ثابت و بدون هزینه انرژی باقی بماند و در صورت نیاز می تواند به سرعت از پله ها بالا برود.
برای عملکرد صحیح، سیستم wheg ایجاد شده توسط روزندو و همکارانش نیاز به اضافه کردن یک موتور سروو در هر چرخ و یک الگوریتم ساده دارد. به غیر از این، طراحی آن ساده و ساده است، بنابراین می توان آن را به راحتی توسط تیم های دیگر در سراسر جهان تکرار کرد.
مزایای این سیستم به قدری زیاد است و معایب آن به قدری اندک است که نمیتوانیم فکر نکنیم که آنها تهدیدی برای «هیجان رباتهای پادار» هستند که در حوزه رباتیک دیده میشود. کائو گفت: هر برنامه کاربردی رباتی که نیاز نهایی به بالا رفتن از پلهها میتواند این طرح را اتخاذ کند، به خصوص اگر با یک ربات دستکاری کننده برای دستکاری اشیاء هنگام دویدن از روی زمین صاف در حالی که مرکز ثقل آن هنگام بالا رفتن از پلهها جابهجا میشود، جفت شود.
محققان سیستم OmniWheg خود را در مجموعهای از آزمایشها با تمرکز بر بسیاری از سناریوهای داخلی در دنیای واقعی، مانند دور زدن موانع، بالا رفتن از پلههای ارتفاعات مختلف و چرخش/حرکت همهجهت ارزیابی کردند. نتایج آنها بسیار امیدوارکننده بود، زیرا ربات پای چرخ آنها میتوانست با موفقیت بر همه موانع رایجی که روی آنها آزمایش شده بود غلبه کند و به طور انعطافپذیر و کارآمد پیکربندی خود را برای مقابله مؤثر با چالشهای حرکتی فردی تطبیق دهد.
در آینده، سیستم ایجاد شده توسط روزندو همکارانش میتواند در روباتهای موجود و جدید ادغام شود تا کارایی آنها در جهتیابی در محیطهای داخلی افزایش یابد. علاوه بر این، کار این تیم میتواند الهام بخش توسعه سیستمهای wheg مشابه بر اساس چرخهای همهجهت باشد.
روزندو افزود: اولین تکرار طراحی ما از یک موتور بدون برس نسبتا “گران قیمت” استفاده کرد، و اکنون فکر می کنیم که یک موتور سبک تر، همراه با کاهش دنده، موثرتر بوده است. ربات تا بتوانیم دینامیک بالا و پایین رفتن از پله ها را با مرکز ثقل بالاتر آزمایش کنیم.
منبع : techxplore
مترجم: کیانوش کرمی