

ساخت اولین ربات هماهنگ در ایجاد حرکات توانبخشی
تاکنون تمام رباتهای تولید شده برای توانبخشی حرکات بیماران از هماهنگی و سرعت عمل کافی برخوردار نبوده است، اما محققان دانشکده مهندسی کاکریل تگزاس موفق به طراحی ربات مجهز به دو بازو شدند که با استفاده از سنسورهای پرسرعت و پردازش بازخوردهای بیمار روند توانبخشی بیماران حرکتی را بهبود میبخشد.
محققان در مورد فاکتورهای موفقیتآمیز این ربات اعلام کردهاند عامل اصلی موفقیتآمیز این ربات توجه خاص به بحث هماهنگی و سرعت پردازش بسیار بالا در جهت افزایش سرعت درمان بیماران حرکتی است.
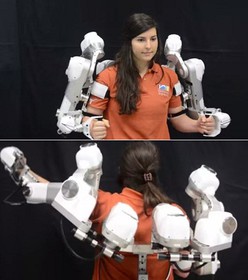
طراحی این ربات به گونهای است که نیم تنه بالایی بیمار را به طور کامل در برمیگیرد، همچنین این ربات مجهز به 14 محور متحرک است که قادر به تولید تمام حرکات قسمت بالا تنه انسان است.
پردازشگر به کار رفته در این ربات قادر به پردازش بیش از 2000 داده در ثانیه است که این امر در ایجاد هماهنگی و راحتی فرایند درمان بسیار مؤثر است.
به گزارش ایسنا،جزئیات بیشتر در مجله University of Texas منتشر شده است.





