به گزارش ایرنا از ناسا، سیستم کنترل کننده این کاوشگر به حسگرهایی مجهز است که می تواند بازخورد نیروی وارد شده به بازوهای کاوشگر را به کاربر منتقل کند و در نتیجه هنگامی که بازوی روباتی کاوشگر با مانعی برخورد می کرد، فضانورد متوجه آن می شد.
این فناوری کاربردهای متعددی را در زمین و فضا دارد و می تواند انسان را از حضور در بسیاری از موقعیت های خطرناک، بی نیاز کند.
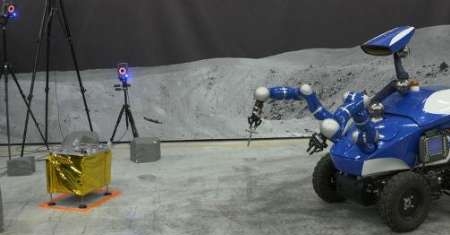
این کاوشگر که Interact Centaur نام دارد، حاصل همکاری دانشجویان دانشگاه فنی دلفت هلند و مهندسان آژانس فضایی اروپا است و از یک طراحی 4×4 بهره می برد. این کاوشگر دارای یک دوربین و دو بازوی روباتیک است که به حسگرهای بازخورد نیرو مجهز هستند.
این آزمایش موفقیت آمیز که در هلند انجام شد، شامل برداشتن یک قطعه فلزی توسط کاوشگر و قراردادن آن درون یک سوراخ بود که به منظور برقراری یک ارتباط الکتریکی باید با دقت یک ششم میلیمتر انجام می پذیرفت.
با در نظر گرفتن فاصله 400 کیلومتری کاوشگر و هدایت کننده آن، برای عملکرد دقیق کاوشگر لازم بود یک نرم افزار عملکرد فضانورد و روبات را به طور دقیق و با خطای کمتر از ثانیه هماهنگ کند.
موفقیت این آزمایش و اثبات دقت سیستم کنترل بازخورد، نخستین گام در راه ساختن کاوشگرهایی برای شناسایی مریخ است که فضانوردان بتوانند آن ها را از مدار سیاره سرخ کنترل کنند.
هدایت کاوشگر زمینی از ارتفاع 400 کیلومتری توسط یک فضانورد