


به گزارش سیناپرس اصفهان، فرید رشیدی، دانشجوی ارشد مهندسی مکانیک دانشگاه صنعتی امیرکبیر و مجری طرح «ربات خزنده» گفت: در میان انواع مکانیزمهای حرکتی، این ربات خزنده از راندمان عملکرد بسیار بالایی برخوردار است و در زمینههای تحقیق، عملیات نجات، صنایع دفاعی، بازرسی لوله و … مورد استفاده قرار میگیرد.
وی افزود: یکی از محدودیتهای رباتهای خزنده این است که نمیتوانند پیکره خارجی خود را تغییر دهند، ولی انواع دیگری از رباتها هستند که قابلیتهای منحصر به فردی از جمله توان و تعادل بالا، تعداد کم عملگرها و عبور از موانع مرتفع را دارند.
این محقق اضافه کرد: این ربات ترکیبی از رباتهای سری و مینیمالیستی است که محدودیت سایر رباتهای خزنده را ندارد.
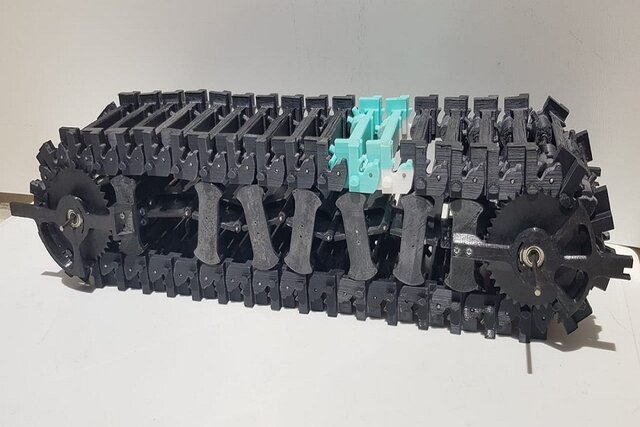
وی با بیان اینکه در همین راستا موفق شدیم رباتی طراحی کنیم که چنین محدودیتی نداشته باشد، گفت: این ربات دارای یک سیستم شاسی انعطاف پذیر است که دو موتور قدرتمند بر روی آن برای پیشروی قرار گرفته است.
این محقق خاطرنشان کرد: هدف بهرهگیری همزمان از دو عدد موتور در ربات، عملکرد صحیح و عدم قفل شوندگی میان اعضا است که سبب افزایش توان ربات نیز میشود.
به نقل از دانشگاه صنعتی امیرکبیر، وی با اشاره به سایر مزایای این ربات گفت: روی سیستم شاسی یک موتور ساده دیگر برای کنترل مکانیزم پیکربندی تعبیه شده که بر اساس نوع موانع بر سر مسیر ربات توسط کاربر، کنترل میشود.
به گفته مهندس رشیدی، نقش اصلی دیگر در سیستم شاسی ربات حفظ شکل هندسی ربات است که در اطراف آن، زنجیره شنی ربات قرار گرفته که با دوران حول شاسی سبب پیشروی ربات و عملکرد مکانیزمهای پیکربندی میشود.
این ربات در پژوهشکده فناوریهای نوی دانشگاه صنعتی امیرکبیر به راهنمایی دکتر حامد غفاری راد و دکتر محمد زارعی نژاد طراحی و ساخته شده است.
منیع: ایسنا