
هرمس رباتی با مغز انسان
دنیای اطراف ما برای موجودات دو پا طراحی شده است، آنهایی که قادر به هدایت دنیا هستند، در حالی که تعادل خود را روی دو پا حفظ میکنند و اجسام را توسط یک جفت دست جابجا میکنند. گاهی اوقات، فضاهای ساخته دست بشر به یک معضل تبدیل میشوند، برای مثال راهپلههای باریکی که در اثر زلزله فرو ریختهاند و بچهای که زیر آوار محبوس شده است، اما هنوز هم برای خلاصی از چنین مخمصههایی به دست انسان نیاز هست. از این نگرش در مسابقه رباتهای نجاتگر «دارپا» استفاده شده است. تیمهای شرکت کننده در این مسابقه رباتهای انسان نمایی میسازند که برای شرایط اضطراری مانند بستن دریچه راکتورهای هستهای دچار نشت و شکستگی طراحی میشوند. «هرمس»، نام یک ربات جدید است که توسط پژوهشگران دانشگاه ام.آی.تی، برای حل مشکل دیگری طراحی و ساخته شده است. این ربات انسان نما، که دارای پوشش محافظ خارجی قابل کنترل از راه دور و عکسالعملهای غریزی است، توسط یک انسان هدایت میشود که اصطلاحا به این فرد پایلوت گفته میشود.
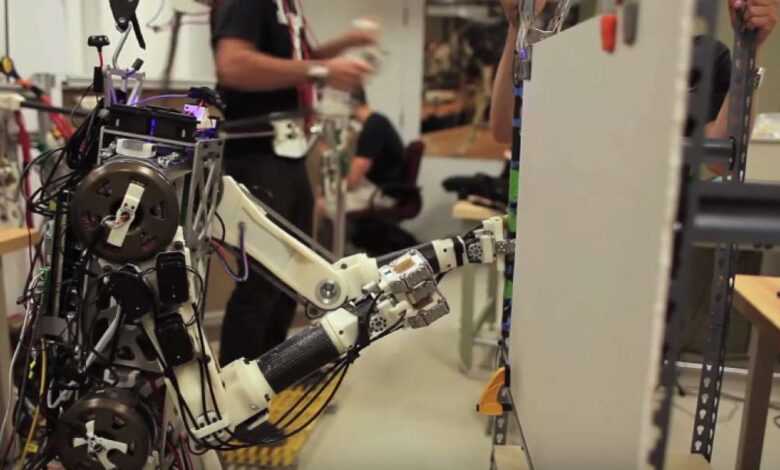
خوئوا راموس، دانشجوی دکترا، هرمس را به این صورت توصیف میکند: سعی بر این است که مغز انسان را داخل یک پوشش فلزی به نام ربات قرار دهیم. در حالی که ربات در موقعیت خطر قرار میگیرد و پایلوت با ایستادن در محل امن میتواند آن را هدایت کند. این ربات که دو دست سه انگشتی دارد قابلیتهای جالب دیگری هم دارد؛ مثلا میتواند در قوطیهای کنسرو را باز کند و یا با ظرافت تمام یک فنجان قهوه بریزد.
اما نوآوری بزرگ مربوط به دستان این ربات نیست، بلکه سنسورهای آن است. در یک ربات انساننما، سنسورهای ربات، ورودی را به تسمههای آن انتقال میدهد تا بتواند موضع خود را مانند یک انسان عادی تصحیح کند. هرمس این عکسالعملها را یاد میگیرد تا در موقعیتهای مشابه از آنها استفاده کند.
فرد پایلوت توسط دستگاه کنترل کنندهای که در دست خود دارد، میتواند دستان ربات را توسط سنسورها و گیرندههای فوق حساس کنترل کند. همچنین یک دوربین روی سر ربات وجود دارد که بازخوردهایی از آنچه ربات پیش رویش می بیند را به صورت فیلمهای مستقیم به پایلوت ارسال کند. به این ترتیب فرد پایلوت میتواند از دریچه چشم ربات اطراف را ببیند، گویی که خود در آن موقعیت قرار دارد. آلبرت وانگ، یکی دیگر از دانشجویان دکترای دانشگاه ام.آی.تی که روی هرمس کار میکند، میگوید: « که در نسخه آینده این ربات، کنترل مستقل با هوش انسانی ادغام خواهند شد. بنابراین زمانی که شما یک ربات نجاتگر را در حال بالا رفتن از یک دیوار میبینید، در واقع یک هوش انسانی آن را کنترل میکند.»
دنیای اطراف ما برای موجودات دو پا طراحی شده است، آنهایی که قادر به هدایت دنیا هستند، در حالی که تعادل خود را روی دو پا حفظ میکنند و اجسام را توسط یک جفت دست جابجا میکنند. گاهی اوقات، فضاهای ساخته دست بشر به یک معضل تبدیل میشوند، برای مثال راهپلههای باریکی که در اثر زلزله فرو ریختهاند و بچهای که زیر آوار محبوس شده است، اما هنوز هم برای خلاصی از چنین مخمصههایی به دست انسان نیاز هست. از این نگرش در مسابقه رباتهای نجاتگر «دارپا» استفاده شده است. تیمهای شرکت کننده در این مسابقه رباتهای انسان نمایی میسازند که برای شرایط اضطراری مانند بستن دریچه راکتورهای هستهای دچار نشت و شکستگی طراحی میشوند. «هرمس»، نام یک ربات جدید است که توسط پژوهشگران دانشگاه ام.آی.تی، برای حل مشکل دیگری طراحی و ساخته شده است. این ربات انسان نما، که دارای پوشش محافظ خارجی قابل کنترل از راه دور و عکسالعملهای غریزی است، توسط یک انسان هدایت میشود که اصطلاحا به این فرد پایلوت گفته میشود.
خوئوا راموس، دانشجوی دکترا، هرمس را به این صورت توصیف میکند: «سعی بر این است که مغز انسان را داخل یک پوشش فلزی به نام ربات قرار دهیم. در حالی که ربات در موقعیت خطر قرار میگیرد و پایلوت با ایستادن در محل امن میتواند آن را هدایت کند. این ربات که دو دست سه انگشتی دارد قابلیتهای جالب دیگری هم دارد؛ مثلا میتواند در قوطیهای کنسرو را باز کند و یا با ظرافت تمام یک فنجان قهوه بریزد.»
اما نوآوری بزرگ مربوط به دستان این ربات نیست، بلکه سنسورهای آن است. در یک ربات انساننما، سنسورهای ربات، ورودی را به تسمههای آن انتقال میدهد تا بتواند موضع خود را مانند یک انسان عادی تصحیح کند. هرمس این عکسالعملها را یاد میگیرد تا در موقعیتهای مشابه از آنها استفاده کند.
فرد پایلوت توسط دستگاه کنترل کنندهای که در دست خود دارد، میتواند دستان ربات را توسط سنسورها و گیرندههای فوق حساس کنترل کند. همچنین یک دوربین روی سر ربات وجود دارد که بازخوردهایی از آنچه ربات پیش رویش می بیند را به صورت فیلمهای مستقیم به پایلوت ارسال کند. به این ترتیب فرد پایلوت میتواند از دریچه چشم ربات اطراف را ببیند، گویی که خود در آن موقعیت قرار دارد. آلبرت وانگ، یکی دیگر از دانشجویان دکترای دانشگاه ام.آی.تی که روی هرمس کار میکند، میگوید: در نسخه آینده این ربات، کنترل مستقل با هوش انسانی ادغام خواهند شد. بنابراین زمانی که شما یک ربات نجاتگر را در حال بالا رفتن از یک دیوار میبینید، در واقع یک هوش انسانی آن را کنترل میکند.
No tags for this post.




